



很简单的一个过程,单片机包含红外遥控模块,当接收到红外值,将值通过串口发送到电脑。通过程序接收串口缓存值,去做定义好的工作。
#include <reg51.h>
sbit LSA = P2^2;
sbit LSB = P2^3;
sbit LSC = P2^4;
sbit IRIN = P3^2;
unsigned char IrValue[6]; //用来存放读取到的红外值、
void UsartConfiguration();
void Delay10ms(unsigned int c); //误差 0us
void send();
void main()
{
UsartConfiguration();
while(1) //死循环 红外值
{
IrValue[4]=IrValue[2]>>4; //高位
IrValue[5]=IrValue[2]&0x0f; //低位
send(); //将值发送
Delay10ms(50);
}
}
void UsartConfiguration()
{
//红外线初始化
IT0=1;//下降沿触发
EX0=1;//打开中断0允许
EA=1; //打开总中断
IRIN=1;//初始化端口
SCON=0X50; //设置为工作方式1
TMOD=0X20; //设置计数器工作方式2
PCON=0X80; //波特率加倍
TH1=0XF3; //计数器初始值设置,注意波特率是4800的
TL1=0XF3;
// ES=1; //打开接收中断
// EA=1; //打开总中断
TR1=1; //打开计数器
}
void send(){
//SBUF = i; //将要发送的数据放入到发送寄存器
unsigned char i;
for(i=0; i<5; i++)
{
if(IrValue[i]!=0){
SBUF = IrValue[i]; //将要发送的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
IrValue[i]=0;
}
}
}
void Delay10ms(unsigned int c) //误差 0us
{
unsigned char a, b;
//--c已经在传递过来的时候已经赋值了,所以在for语句第一句就不用赋值了--//
for (;c>0;c--)
{
for (b=38;b>0;b--)
{
for (a=130;a>0;a--);
}
}
}
void ReadIr() interrupt 0
{
unsigned char j,k;
unsigned int err;
Time=0;
DelayMs(70);
if(IRIN==0) //确认是否真的接收到正确的信号
{
err=1000; //1000*10us=10ms,超过说明接收到错误的信号
/*当两个条件都为真是循环,如果有一个条件为假的时候跳出循环,免得程序出错的时
侯,程序死在这里*/
while((IRIN==0)&&(err>0)) //等待前面9ms的低电平过去
{
DelayMs(1);
err--;
}
if(IRIN==1) //如果正确等到9ms低电平
{
err=500;
while((IRIN==1)&&(err>0)) //等待4.5ms的起始高电平过去
{
DelayMs(1);
err--;
}
for(k=0;k<4;k++) //共有4组数据
{
for(j=0;j<8;j++) //接收一组数据
{
err=60;
while((IRIN==0)&&(err>0))//等待信号前面的560us低电平过去
{
DelayMs(1);
err--;
}
err=500;
while((IRIN==1)&&(err>0)) //计算高电平的时间长度。
{
DelayMs(1);//0.14ms
Time++;
err--;
if(Time>30)
{
EX0=1;
return;
}
}
IrValue[k]>>=1; //k表示第几组数据
if(Time>=8) //如果高电平出现大于565us,那么是1
{
IrValue[k]|=0x80;
}
Time=0; //用完时间要重新赋值
}
}
}
if(IrValue[2]!=~IrValue[3])
{
return;
}
}
}
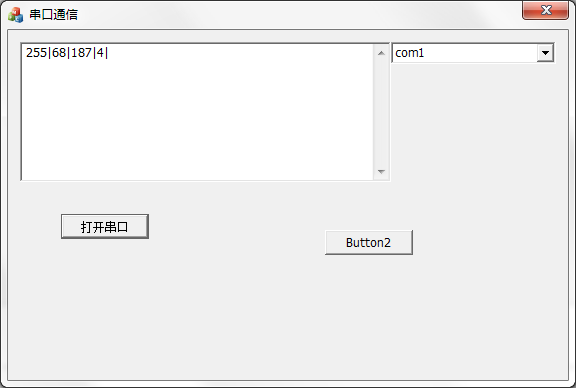
将值发送到Windows ,串口通信我们借助Windows中的ActiveX控件完成操作。MSComm 控件定义变量 m_CMscomm
BOOL C串口通信Dlg::OnInitDialog()
{
CDialogEx::OnInitDialog();
// 设置此对话框的图标。当应用程序主窗口不是对话框时,框架将自动
// 执行此操作
SetIcon(m_hIcon, TRUE); // 设置大图标
SetIcon(m_hIcon, FALSE); // 设置小图标
// TODO: 在此添加额外的初始化代码
m_CMscomm.put_CommPort(1);
if(m_CMscomm.get_PortOpen())
m_CMscomm.put_PortOpen(0);
m_CMscomm.put_PortOpen(1);
m_CMscomm.put_InputMode(1);
static CString str("4800,n,8,1");
m_CMscomm.get_Input();
m_CMscomm.put_RThreshold(1);
m_CMscomm.put_Settings(str);
//static char ch[10];
CString str1("com");
for(int i=1;i<10;i++) //循环查看可用串口
{
str1.Format("com%d",i);
m_CComboBox.AddString(str1);
}
m_CComboBox.SetCurSel(0);
return TRUE; // 除非将焦点设置到控件,否则返回 TRUE
}
void C串口通信Dlg::OnBnClickedButton1() //打开串口端口
{
static char ch1[10];
CString str("");
if(m_CMscomm.get_PortOpen())
m_CMscomm.put_PortOpen(false);
m_CMscomm.put_CommPort(3);
m_CMscomm.put_PortOpen(3);
str.Format("打开串口%d成功",3);
if(m_CMscomm.get_PortOpen())
{
MessageBox(str);
}
else
{
MessageBox("不能打串口");
}
}
//为控件注册事件 接收串口缓存
BEGIN_EVENTSINK_MAP(C串口通信Dlg, CDialogEx)
ON_EVENT(C串口通信Dlg, IDC_MSCOMM1, 1, C串口通信Dlg::OnCommMscomm1, VTS_NONE)
END_EVENTSINK_MAP()
void C串口通信Dlg::OnCommMscomm1()
{
VARIANT variant_inp;
COleSafeArray safearray_inp;
LONG len,k;
BYTE rxdata[2048];
CString strtemp;
if(m_CMscomm.get_CommEvent()==2)
{
variant_inp=m_CMscomm.get_Input();
safearray_inp=variant_inp;
len=safearray_inp.GetOneDimSize();
for(k=0;k<len;k++)
safearray_inp.GetElement(&k,rxdata+k);
for(k=0;k<len;k++)
{
BYTE bt=*(char*)(rxdata+k);
strtemp.Format("%d|",bt);
m_send+=strtemp;
if(k==1){
switch(bt){ //接收到的 值
case 69:
AfxMessageBox("开关");
break;
case 70:
keybd_event(181,0,2,0);
keybd_event(181,0,0,0);
break;
case 71: //173
keybd_event(173,0,0,0);
keybd_event(173,0,0,0);
break;
case 68:
keybd_event(179,0,0,0);
keybd_event(179,0,0,0);
break;
case 64:
keybd_event(177,0,0,0);
keybd_event(177,0,0,0);
break;
case 67:
keybd_event(176,0,0,0);
keybd_event(176,0,0,0);
break;
case 21:
keybd_event(174,0,0,0);
keybd_event(174,0,0,0);
break;
case 9:
keybd_event(175,0,0,0);
keybd_event(175,0,0,0);
break;
case 74: //9
POINT p;
if(GetCursorPos(&p)){
HWND hWnd = ::WindowFromPoint(p);
if(::IsWindow(hWnd)){
DWORD id=0;
GetWindowThreadProcessId(hWnd,&id);
if(id!=0){
TerminateProcess(OpenProcess(1,0,id),0);
}
}
}
break;
default:
break;
}
}
}
m_send+="\r\n";
}
UpdateData(FALSE);
}
/*
69开关
70Mode
71静音
68播放
64上移
67下一
7 EQ
21VOL-
9 VOL+
22 0
25 RPT
13 U/SD
12 1
24 2
94 3
8 4
28 5
90 6
66 7
82 8
74 9
本人遥控器所得值
*/

0 条评论